
Each application requires a custom sensor and in some cases a sensor needs a filter to perform optimally . In this article we answer a number of important questions: which filters are there? How can I set these filters? And how do these filters work? Read on and find out which filters there are for the ultrasonic sensors from microsonic.
F00 - No filter activated
Every distance measurement is done unfiltered when the no filter setting is applied. This setting is preferrably used in measurements that are performed in laboratory environments. It is not recommended for industrial use.
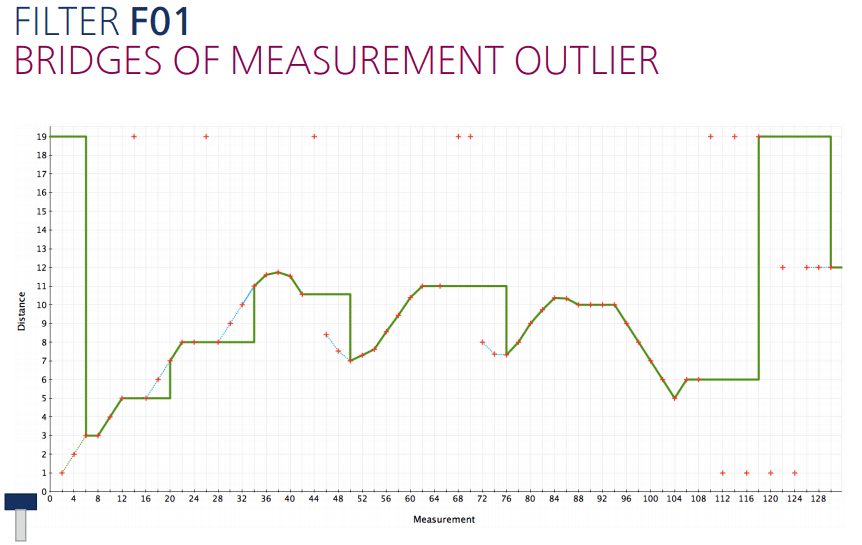
F01 - Standard filter
With this filter it is possible to filter the measurements. By changing the hold-time of a rapidly changing value, or even completely turning it off, it is possible to determine which peak values can be accepted as a real measurement. This filter is the best choice for most industrial applications.
F02 - Averaging filter
This filter setting is the standard for analog ultrasonic sensors to smooth the change in distance. This filter can be applied in applications that have to deal with vibrations that can be seen in the measurements by flattening these. The output values remain stable this way. Thus, peak values will only occur when these surpass the vibrations of the applications significantly.

F03 - Foreground filter
The sensor will have a delayed response with this filter during fast changes in distance. Preferrably, the most near objects will be detected. An example of this is the spraying arm on an agricultural vehicle. It is necessary that the background object, the ground in this case, is ignored. Because of this, the object on the foreground, in this case the vegetation, can be detected and measured.

F04 - Background filter
This filter makes the sensor have a response delay in rapid changes in proximity, preferrably objects that are further away will be detected. An example of such an application is a fan in front of an object that has to be ignored. This settings makes it possible to ignore the fan in detections and measurements.

What suits your application best?
Which sensor supports which filter? In the table below it can be seen which microsonic sensor series supports which filters:




